Tom Stein
-
Posts
49 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Blogs
Everything posted by Tom Stein
-
A direct message with this question was answered earlier today. Here is the response, made available to others who might have the same question.
-
Hi jomynn - Would you please post an example that you'd like to see worked through? A specific image, perhaps?
-
Data and documentation from Mars InSight lander acquired through 30 June 2022 are released. Some data may still be loading into the Notebook; see Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/ins
-
Data and documentation from Mars 2020 Perseverance rover sols 300 to 419 are released. Some data may still be loading; see Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/m20
-
The Phoenix Analyst's Notebook has been updated with new information and access tools. New features include mission summaries like the mission overview and time tables; faceted data search; science targets with Mars Target Encyclopedia literature references; data set DOIs; optional user accounts; and cart-based data ordering. The previous version of the Phoenix Notebook remains available.
-
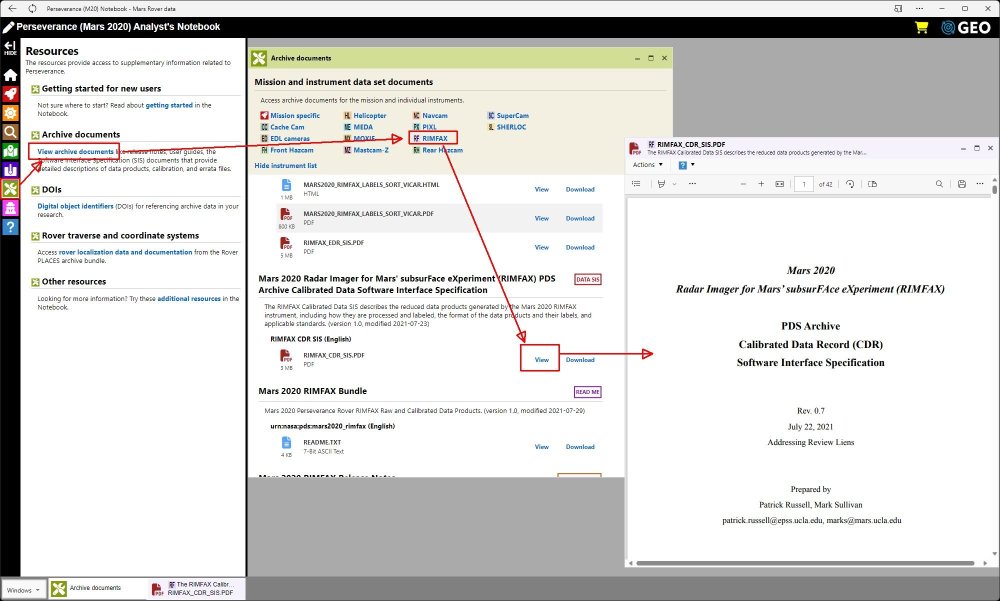
 2022-0418-AN-MSL-Navcam-order.mp4 The above video demonstrates how to order data from the Analyst's Notebook using search filters and the cart order system. The transcript of the video is provided below.
2022-0418-AN-MSL-Navcam-order.mp4 The above video demonstrates how to order data from the Analyst's Notebook using search filters and the cart order system. The transcript of the video is provided below. -
Data and documentation from Mars InSight lander acquired through 31 December 2021 are released. Some data may still be loading into the Notebook; see Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/ins
-
Data and documentation from Mars 2020 Perseverance rover sols 180 to 299 are released. Some data may still be loading; see Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/m20
-
Data and documentation from MSL Curiosity rover sols 3193 tp 3289 are released. Some data may still be processing. See Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/msl
-
Source data for sol overview and documents
Tom Stein replied to erentar's topic in Using the Notebook
The Notebook is the only resource for these documents. You might find similar sites with mission logs hosted by various instrument teams. -
Source data for sol overview and documents
Tom Stein replied to erentar's topic in Using the Notebook
Great question. The sol documents you refer to are the Mission Manager and Documentarian reports that provide a view into science operations—insight into why and how particular observations were made. The reports have not been edited except for grammar and spelling, and to remove spacecraft and instrument sensitive materials. As you note, the sol documents are not part of the formal science archive. They are provided courtesy of the respective mission science teams who approve the content. Separate from the sol documents are mission and data set documents that are collected from archive bundles and volumes and are designed to promote understanding off the mission, spacecraft, instruments, and data formats. I have updated the online help to include a more detailed description of sol documents, highlighting the fact that they are not part of the formal archive. -
Data and documentation from MSL Curiosity rover sols 3069 to 3192 are released. Some data may still be processing. See Data release status for details. Some instrument teams may include additional and/or reprocessed data in their archive deliveries to PDS. Refer to instrument errata and readme documents for details, or contact us with questions. https://an.rsl.wustl.edu/msl
-
The Image viewer tool has an updated drawing library. Users should notice improvement in text annotation quality and general responsiveness. See Image viewer for more about the tool.
-
The Mars 2020 Analyst's Notebook for Perseverance Rover is released in beta version and is available to the public. The Notebook includes data and documentation from PDS releases 1 and 2, containing data from sols 0 to 179. https://an.rsl.wustl.edu/m20 Known limitations for the beta version are described in the online help.
-
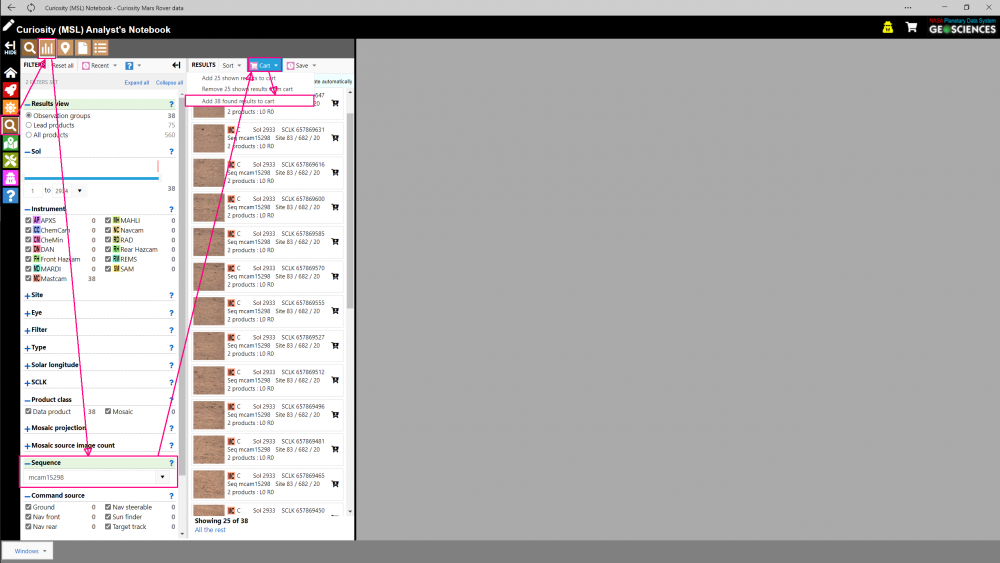
Hi Neal - Your question makes perfect sense. In the data search, you can enter a sequence ID as a search criterion. The available sequences will appear as you type, so by entering "15298", for example, the selection box provides the correct sequence ID "mcam15298". Search results will appear on the right side where you can add the found items to your cart from the menu. See the attached image as an example. You can apply other search criteria as you wish. The default results for MastCam will be DRCX products. If you are looking for XXXX products, try this trick: select "All products" from the "Results view" option at the top of the filter list, and then enter "*XXXX" in the "ID" option at the bottom of the filters. You can further restrict the selection to omit thumbnails by selecting "C" Mastcam data type under the "Type" filter option. Tom
-
The Analyst's Notebook has been updated with data from release 5, containing data from sols 391 to 478 for the InSight lander. https://an.rsl.wustl.edu/ins
-
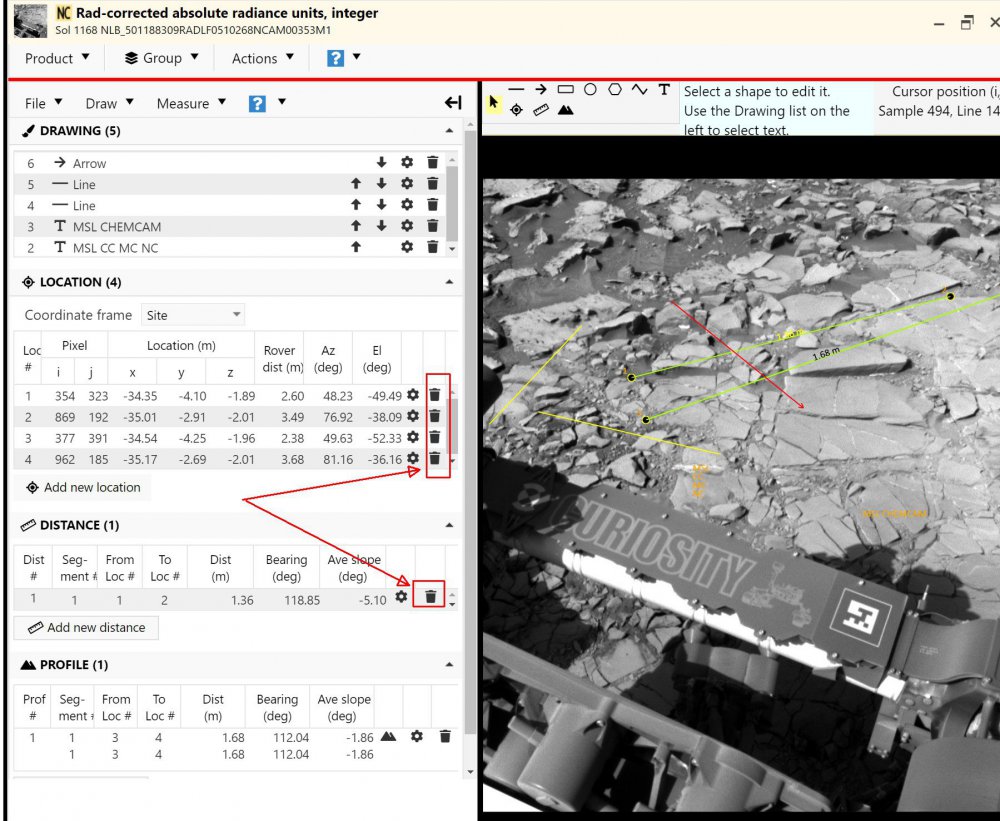
Hi, Jimmy. You should be able to delete individual measurements and other elements by clicking on the corresponding trash can icon in the list of elements to the left of the image. See the image below for an example. Note that deleting one annotation may delete others as well. For example, if you delete a location that is the endpoint of a distance measurement, the endpoint locations and the distance measurement all will be deleted. You will receive a warning in such cases asking you to confirm the delete. Please let us know if you still feel that the tool isn't working the way you expect. I am glad that you find the measurement tools useful. You are welcome to make suggestions for tool enhancements.
-
Creating an RGB image from MER and Phoenix data
Tom Stein commented on Christina Kreisch's blog entry in Using the Analyst's Notebook
Hi Dane - You are correct...the Analyst's Notebook has changed a lot over the past 8 years. The procedure is largely the same, although the resulting image is downloaded rather than popped open, as you say. It is important to note that the RGB is created using a simple algorithm that performs a 2% linear stretch on the source images and then assigns them to the red, green, and blue channels to make the composite image. Ideally, one would want to perform custom stretches on radiometrically calibrated source images using image processing software such as ENVI. The scene content affects the Notebook's default linear stretch and thus how the simple RGB looks. What is the image you are working with? And how important is it to you to have the custom image pop up in a browser tab vs direct download? -
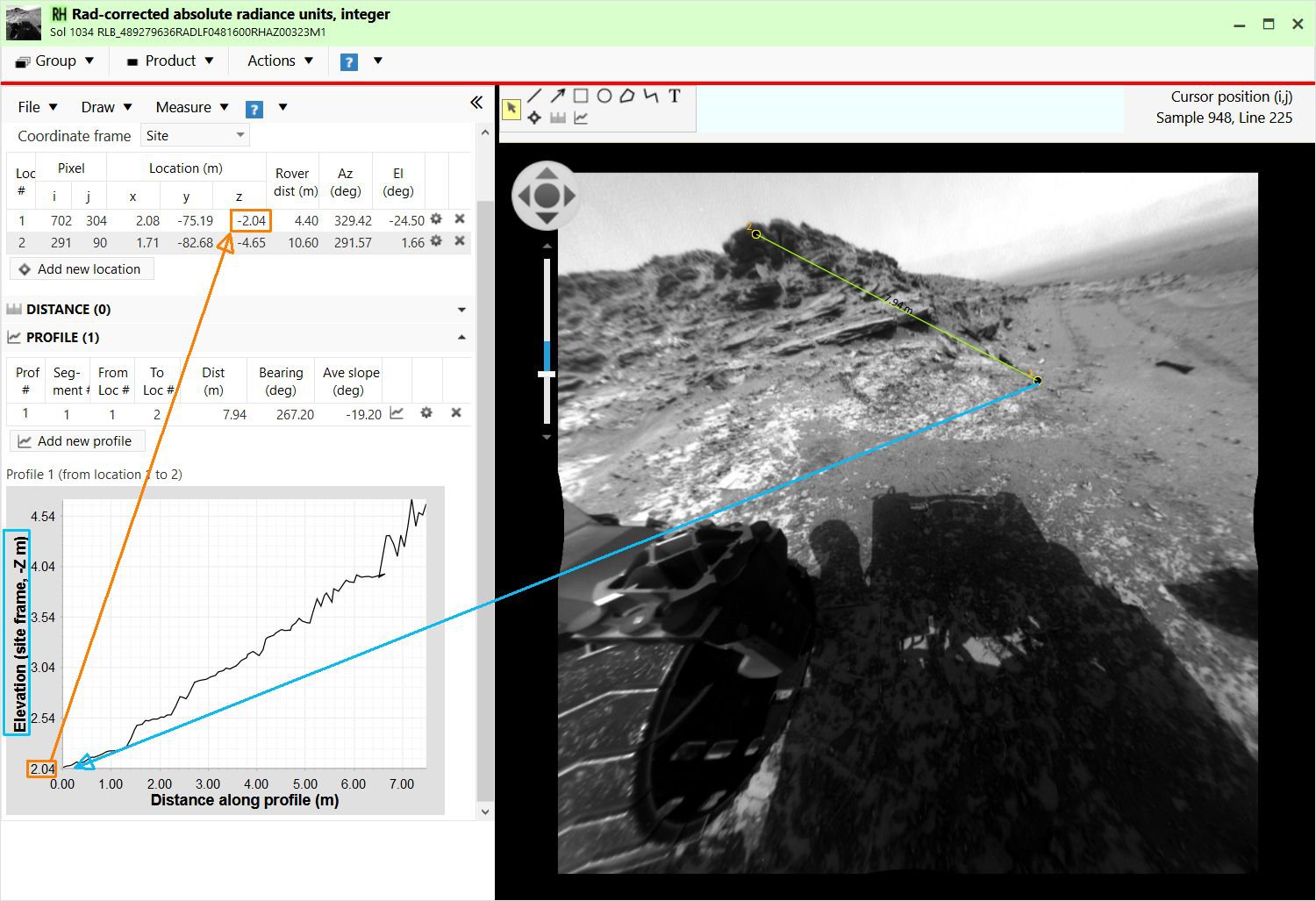
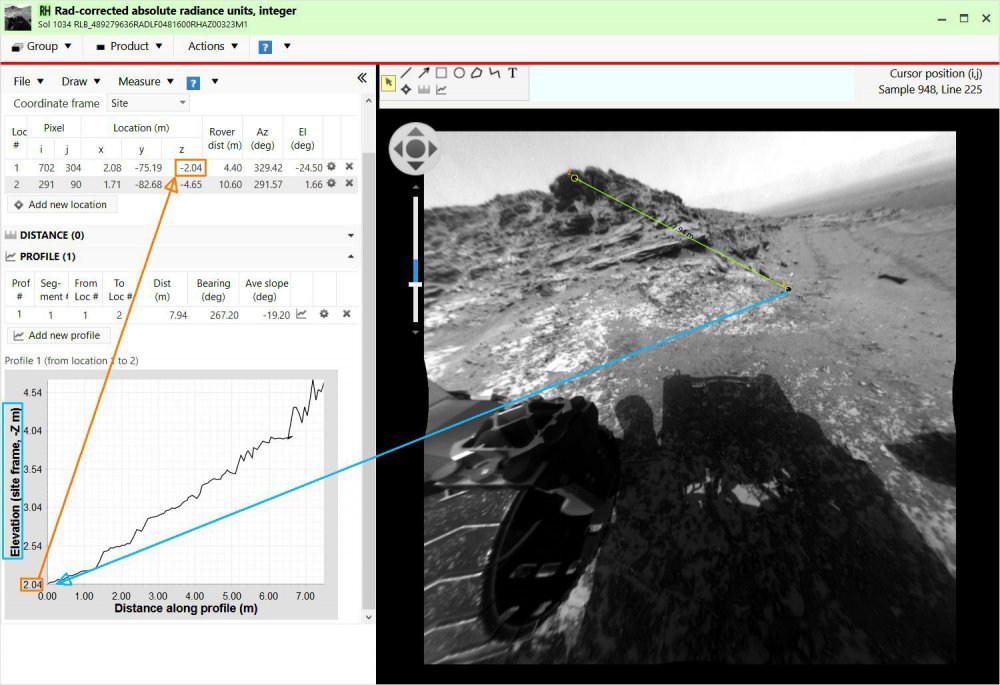
The profile plot y -axis is elevation in site frame. To be specific, the elevation values shown are the rover's negative z-axis values because in site frame, the rover's z-axis is positive down. You will notice in the attached example, the elevation of the first point is z = -2.04m in the location list and 2.04m in the profile plot. (Remember, the profile shows elevation as -z values.) If you change the Coordinate frame from Site to Rover using the drop down menu, you will see different z values in the location list. The profile plot x-axis is distance along the profile, with the first point in the plot being the beginning of the profile drawn on the image. This means that, although the plotted elevation is absolute using site frame values, the distance along the profile is relative to the points selected. Note that the profile calculated returns the elevations along a path as if it were "dropped on the ground" between the two points. The profile is not simply the elevation values of the image pixels under the line drawn on the image.
-
Hi Jimmy - thanks for dropping the note. We're sorry for the inconvenience. I tracked down the problem to an integer conversion and the fix is in place. You probably will need to refresh your browser window. Please let me know how it goes.
-
Glad to hear!
-
You are correct, Jimmy. The Mastcam L/R have different fields of view which can make working with the stereo pairs more difficult. The Notebook uses Navcam XYZ data products generated by the team to support the measurement and distance tools. However, the Mastcam team does not produce XYZ data products, thus the Notebook measurement tools can't support Mastcam images taken as stereo pairs.
-
You can use GDAL to convert the IMG file to a number of formats. I used v2.4. Be sure to use the PDS label (.LBL) file as the input to gdal_translate: gdal_translate -of GTiff 1627MR0083990000801607K00_DRCX.LBL .\1627MR0083990000801607K00_DRCX.tif GDAL is available at http://www.gdal.org/ and you can read more about the gdal_translate command at http://www.gdal.org/gdal_translate.html
-
You can find the raw image archives at the PDS Cartography and Imaging Sciences Node: https://pds-imaging.jpl.nasa.gov/volumes/msl.html
-
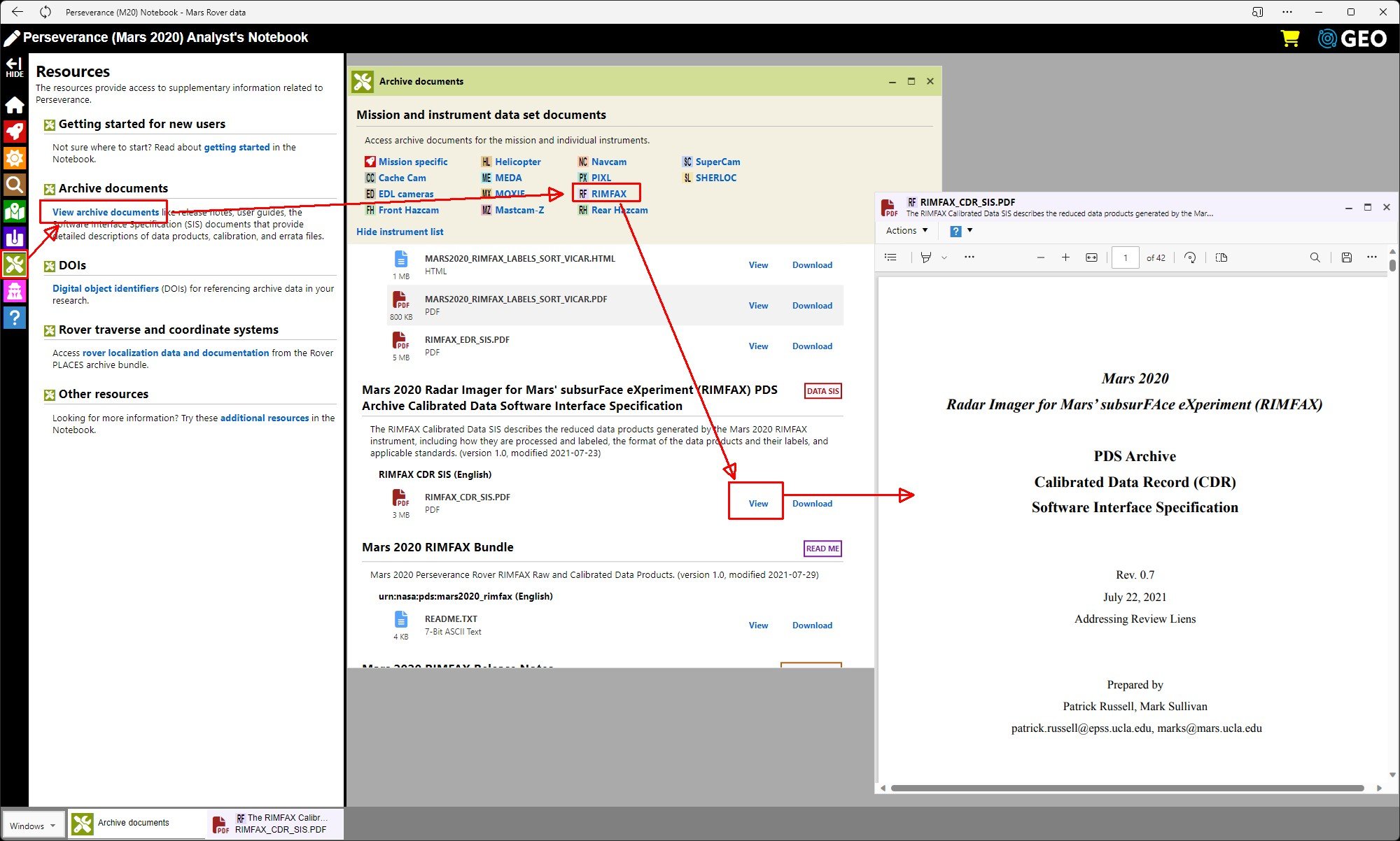
The sol 1627 sequence does have 112 thumbnail video frames (product type "K"). Unfortunately, the command sequence did not include a request for full-resolution frames to match. Note that the 10 K-type products you see for sol 1627 are really the two "XXXX" images and the eight derived images (four from each) that include a variety of color correction, linearization, and other techniques applied. The four Mastcam derived image types (also called processing codes) are DRXX, DRCV, DRLX, and DRCL. You can read about them in the data product SIS (Software Interface Specification). In the Notebook, click on the Resource tab, then choose "View documents". Select Mastcam and scroll down to the document titled "MSL_MMM_EDR_RDR_DPSIS.PDF". Only a handful of sols have full-resolution (or higher-resolution) Mastcam movie sequences. Through the current data release, the sols are: Type K, sols 351, 363, 368, 713, 1032, 1627, 1668, 1692, 1693, 1972 Type L, sols 363, 368, 369, 650, 713, 1032 Type M, sols 284, 284, 289, 351, 1625 The K-type sequences generally have the fewest frames per sequence. Some sols have multiple sequences. You can find the images in the Notebook from the Search > Data form. Enter the sol, instrument, and product type, and also put the processing code "DRCX" in the Product ID box. This will restrict the number of images that are returned. PS. Nice video. I'd like to see what you get from higher-res images.